



电调直流小马达36V
-
 直流小马达控制器远程
直流小马达控制器远程
¥258
-
直流马达24V控制器
¥258
-
正反转调速器远程直流马达
¥258
-
控制器36V直流小马达
¥258
-
控制器直流马达远程
¥258
-
直流小马达远程控制器
¥258
-
驱动器RS585直流小马达
¥258
-
控制器RS585直流小马达
¥258
电调直流小马达36V
产品别名 |
国产小型电机驱动器,电机正反转调速器,小控制器 |
面向地区 |
全国 |
品牌 |
国产 |
型号 |
MC-Q2408R |
产地 |
深圳 |
产品认证 |
CE |
加工定制 |
是 |
用途 |
直流有刷电机调速,远程控制 |
规格尺寸 |
5cmX5cmX2cm |
直流有刷电机驱动器(DC brushed motor driver)是一种用于控制和驱动直流有刷电机的电子设备。这些驱动器主要用于需要控制转速和方向的应用,例如机器人、自动化系统、工业设备和消费类电子产品中。 ### 结构和工作原理 直流有刷电机驱动器的基本结构包括以下几个关键部分: 1. **电源输入**:通常是直流电源,其电压和电流规格取决于所驱动电机的要求。 2. **电机接口**:用于连接直流有刷电机的电源线和控制信号线。典型的接口包括电源线(通常是正极和负极),以及控制电机转速和方向的输入信号。 3. **电机驱动电路**:驱动电路可以分为功率驱动部分和控制逻辑部分。 - **功率驱动部分**:负责提供电流以驱动电机的转子,通常通过功率晶体管(MOSFET)或功率BJT(双极型晶体管)来实现。 - **控制逻辑部分**:接收来自控制器(如微控制器或PLC)的输入信号,根据输入信号调整功率驱动部分的输出,控制电机的速度和方向。 4. **保护电路**:为了保护电机和驱动器本身,通常会包括过载保护、过电流保护和过热保护电路。 ### 功能和特性 直流有刷电机驱动器具有以下功能和特性: - **速度控制**:通过调整输入信号的脉宽调制(PWM)或电压来控制电机的转速。 - **方向控制**:通过控制输入信号的极性或使用额外的控制信号线来改变电机的旋转方向。 - **电流调节**:一些驱动器可以监测和调整输出电流,以电机工作在安全和的电流范围内。 - **编码器反馈支持**:对于需要更位置控制的应用,驱动器可以与编码器结合使用,以提供位置反馈。 - **低功耗模式**:一些驱动器支持低功耗待机模式或睡眠模式,以节省能量。 ### 应用领域 直流有刷电机驱动器广泛应用于各种领域,包括但不限于: - **机器人技术**:用于驱动机器人的关节和移动部件。 - **工业自动化**:用于控制输送带、泵和风机等设备。 - **消费类电子产品**:如电动工具、电动玩具和家电。 - **汽车和交通**:在汽车的座椅调节、车窗升降等系统中使用。 - **医疗设备**:例如手术机器人和呼吸机。 ### 选择驱动器的考虑因素 选择适当的直流有刷电机驱动器时,需要考虑以下因素: - **电机规格**:包括电压、电流、额定功率和大功率等。 - **控制要求**:速度范围、精度和响应时间。 - **环境条件**:如温度范围和防护等级。 - **集成需求**:是否需要集成编码器反馈或其他传感器。 - **成本和可靠性**:驱动器的成本、可靠性和维护要求。 综上所述,直流有刷电机驱动器是现代电子控制系统中不可或缺的部分,通过有效地控制电机的转速和方向,实现了许多自动化和电动化应用的核心功能。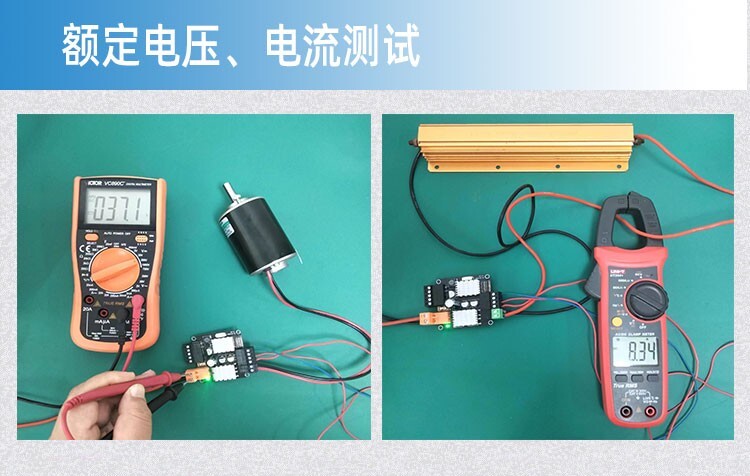
项目 参数 备注
电源电压 DC12V ~ 36V 直流恒压电源
驱动电流 0 ~ 8A 可连续输出
端口信号控制 模拟量,PWM,PPM 电压信号,占空比,脉冲
模拟量范围 0~5V/0 ~ 10V 可以设置
输入PWM频率 250Hz ~ 1KHz 高电平电压范围7V~24V
输入PWM分辨率 1/1000 即0.1%
输入PPM频率 1 ~ 30000Hz 范围可以设置,大PPM频率有效值可以设置到30KHz以内
输出PWM控制频率 可调 默认20KHz
输出PWM控制分辨率 1/1000 即0.1%
输出PWM控制占空比范围 1.0% -99.0%
控制方式 ①、扭矩控制
②、电流控制 控制方式可设置
堵转电流保护 达到大允许电流停止输出 大允许电流可设置,在额定电流以内
限位 具有正、反转限位 可设置
通讯方式 RS485通讯 默认支持RS485 Modbus RTU, 波特率:9600
调速方式 ①、支持上位机指令
②、支持PLC
③、支持单片机
④、支持电位器调速 通过拨码选择
参数设置方式 上位机调试软件
我公司自研专属调试软件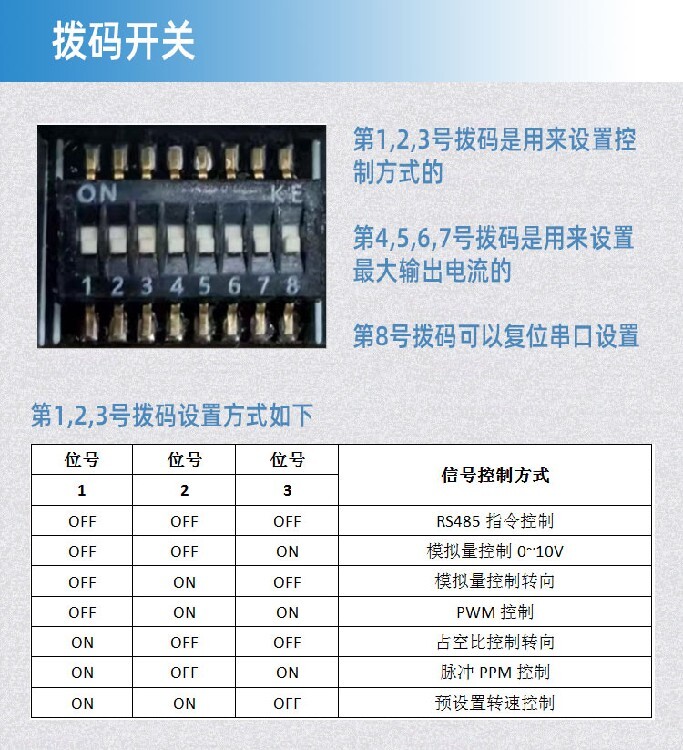
附录一、RS485 Modbus-RTU通讯协议
本驱动器使用MODBUS-RTU(国标GB/T19582-2008)通讯协议进行通讯,支持一主站控制多个从站,通过公共地址可发送指令配置 254 个从站地址,主站可以是单片机、PLC或PC机等。
1 、通讯参数
波特率默认为 9600bps,数据位为 8 位,无校验,停止位为 2 位;
从站地址默认为0;也可以使用公共地址0xFF;
波特率可配置为:96;
数据位可配置为:8位,9位;
停止位可配置为:1停止位,2停止位;
校验位:可配置为无校验,奇校验和偶校验;
当配置为无校验时,数据位应配置为8位,停止位配置为2位;
当选择奇校验或者偶校验时,数据位应配置为9位,停止位配置为1位;
2、 MODBUS-RTU帧格式
本驱动器支持 MODBUS 的 0x03(读保持寄存器)、0x06(写单个寄存器)和
0x10(写多个寄存器)。
2.1、 0x03 读保持寄存器
主站发送:
字节 内容
1 从站地址
2 0x03
3 起始寄存器高字节
4 起始寄存器低字节
5 寄存器数高字节
6 寄存器数低字节
7 CRC低字节
8 CRC高字节
第 1 字节: 从站地址码(=001~254)
第 2 字节 0x03: 读寄存器值功能码
第 3、4 字节: 要读的寄存器开始地址
第 5、6 字节: 要读的寄存器数量
第 7、8 字节: 从字节 1 到 6 的 CRC16 校验码
从站回送:
字节 内容
1 从站地址
2 0x03
3 字节总数
4 寄存器1的数据
5
6 寄存器2的数据
7
… … … ….
M-1 寄存器M的数据
M
M+1 CRC低字节
M+2 CRC高字节
第 2 字节 0x03: 返回读功能码
第 3 字节: 从 4 到 M(包括 4 及 M)的字节总数
第 4 到 M 字节: 寄存器数据
第 M+1、M+2 字节: 从字节 1 到 M 的 CRC16 校验码
当从站接收错误时,从站回送:
字节 内容
1 从站地址
2 0x03
3 异常码
4 CRC低字节
5 CRC高字节
第 1 字节: 从站地址码(=001~254)
第 2 字节 0x83: 读寄存器值出错
第 3 字节 异常码:见2.4
第 4、5 字节: 从字节 1 到 3 的 CRC16 校验码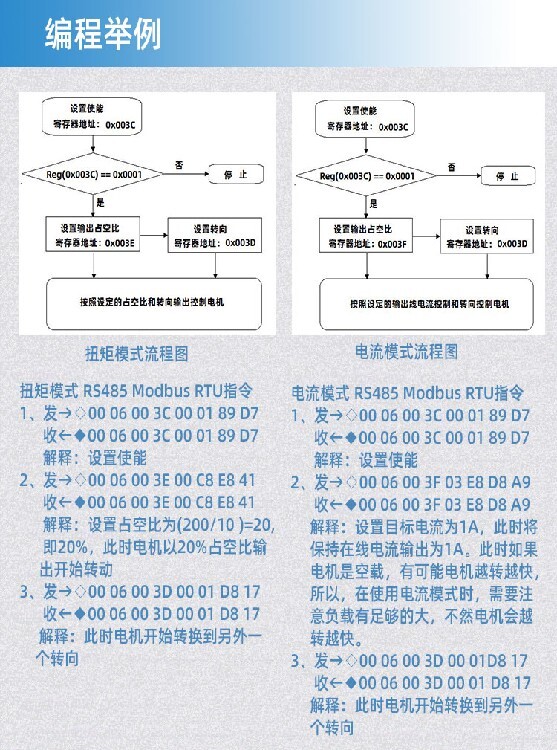
可通过拨码开关选择利用RS485指令控制,拨码开关设置请参考1.3;当选择RS485指令控制时,方向控制端口和信号输入端口均无效。当多台控制器通过RS485总线组网时,可以参考图2-7接线方式,此时需要注意在首台和尾台需要各加一个120欧姆的终端电阻。

点击“从驱动器中读取”按钮,将驱动器当中的当前参数读出来,使得上位机软件与驱动器内部的参数保持一致。然后在按照实际使用情况设置好参数,正确设置,设置完成以后,点击“写入驱动器”按钮即可。
在该页面中:
加速时间:即电机从当前转速转到目标转速的缓启时间;
减速时间:即电机从当前转速降到停止的缓停时间;
SV小有效电压:即若驱动器配置模拟量控制时,则IN1端子的电压如果低于该值时,认为是零电压;
SV大有效电压:即若驱动器配置模拟量控制时,则IN1端子的电压如果该值时,认为是已达到上限电压;
PWM输出上限:即输出端输出PWM的上限,该值可以限制输出电压;
PWM输出频率:即输出端输出PWM的频率,默认为20KHz;
PPM电子齿轮比:即选择PPM控制时,用于对输入的脉冲频率进行分频;
输入PPM大频率:即当输入的脉冲频率达到该值时,输出到达大;
输入PPM小频率:即当输入的脉冲频率低于该值时,输出为零;
预置占空比:即当选择预置转速控制模式时,如果选择的是扭矩模式,则开机以后,按照此设置的占空比控制电机转动;
预置电流:即当选择预置转速控制模式时,如果选择的是电流模式,则开机以后,按照此设置的目标电流控制电机;
点击“从驱动器中读取”按钮,将驱动器当中的当前参数读出来,使得上位机软件与驱动器内部的参数保持一致。然后在按照实际使用情况设置好参数,正确设置,设置完成以后,点击“写入驱动器”按钮即可。
在该页当中:
电流闭环比例系数(P): 电流闭环控制参数;
电流闭环积分系数(I): 电流闭环控制参数;
电流闭环微分系数(D): 电流闭环控制参数;
电流闭环参数对电流模式有影响;
深圳市淼控智能科技有限公司
深圳市淼控智能科技有限公司--成立于2019年7月,坐落于美丽的滨海之都,梦想之城--深圳市,是一家电机驱动器及自动控制周边产品制造的小微科技研发型企业。公司自成立之初始终秉承“品质为本、诚信务实、工匠精神”的(品、城、匠)经营理念,甘为企业上马石,服务于人工智能、智慧医疗、智能制造、智能家居等科技领域。公司从产品细节及用户体验出发,潜心研发出几款智能控制型直流无刷电机驱动器和直流有刷/无刷一机两用型电机驱动器以及继电器(I/O)控制卡,其中以MC-FBLD-6600型为代表的直流无刷/有刷一机两用型电机驱动器正在稳步的..……